

开放科学(资源服务)标识码(OSID): 
0 引言
在《独立覆盖流形法的通用计算公式和通用程序设计——(一)通用计算公式》[1]中,将第i个覆盖对应于第mi项级数的形函数矩阵 表达为单位分解函数φi、坐标转换矩阵Li和级数矩阵 的乘积,具体讨论了各种情况下的形函数矩阵及其导数。对于弹性力学运动微分方程、传导方程、波动方程的一维至三维稳态和瞬态分析及其各类边界条件,由形函数及其偏导数矩阵形成单元质量矩阵、刚度矩阵和各种荷载向量,组集成整体矩阵后(瞬态分析再通过时间步的离散)形成线性方程组进行求解。
本文是独立覆盖流形法的通用计算公式和通用程序设计的第二部分——通用程序设计。首先介绍程序流程和程序设计思路,对一维至三维可能出现的各种几何形体(包括分区、条带和边界面,其含义见文献[1])的积分方式进行总结,提出积分子程序设计方案;然后将积分坐标转换成被积函数中的各种坐标,以计算被积函数并得到各种矩阵;通过裂纹尖端解析级数的计算流程给予具体示例;最后总结程序在通用性设计上的特点。
1 程序流程和设计思路
1.1 坐标定义
独立覆盖流形法适用于任意形状的覆盖网格,这意味着几何描述有一定的复杂性,而且程序的底层运行是由几何数据推动的,因此有必要重申一下描述几何数据的各种坐标,包括输入坐标 、整体坐标x、参数坐标 、积分坐标x'、覆盖坐标 、级数坐标 :
(1)输入坐标 是几何模型输入数据采用的坐标,包括通常情况下的整体直角坐标x(简称整体坐标),或用于曲线或曲面描述的参数坐标 。
(2)积分坐标x'是数值积分时采用的坐标,比如:在直线或平面边界所围成的分区积分中,通常为整体坐标;由分区界面(或本质边界条件所在的边界面)向内部扩展形成条带(或边界条带),这些面及其法向形成条带的积分坐标系,条带处的单位分解函数φi(x')由x'的法向坐标确定;其他如荷载作用的边界面、分区中的曲线(曲面)和其下面的直线(平面)所围区域等也要确定积分坐标系(见下文)。
(3)在各覆盖中定义覆盖坐标系 ,最常见的是采用整体坐标x,也可能根据材料的方向、裂纹尖端所在覆盖的裂纹走向来定义。对于边界条带中的边界覆盖有 =x'。由 定义的Li( )矩阵用于位移的坐标转换。
(4)级数坐标 即级数矩阵 ( )中的坐标,如二维裂尖附近的解析级数采用的(r,θ)极坐标,多项式级数中将 归一化的坐标 = ,其中 为覆盖的中心坐标, 表示该覆盖在各方向的尺度。
1.2 程序流程


首先由图1可知,由输入坐标 形成一维至三维的各种几何体,通过数值积分得到积分点处的积分坐标x',转换到覆盖坐标 ,进而得到级数坐标 ,分别用于计算单位分解函数φi、坐标转换矩阵Li和级数矩阵 。再分别由x'、 和 与整体坐标x的关系,计算 、 和 。
左上角框向右,得到形函数子矩阵 ,然后分别计算质量子矩阵 ,各种荷载子向量 ,或第三类边界条件的刚度子矩阵 ,形成单元质量矩阵Me、刚度矩阵Ke和荷载向量Fe。图中ρ为密度,D和Db为参数矩阵,f和q分别为体荷载(或点荷载)和面荷载,L为边界面上的坐标转换矩阵,u'0 为边界位移,具体表达式见文献[1]。
单元矩阵和向量组集成整体矩阵和向量K、M、F和u,进入右下角的几个框,形成线性方程组进行求解,其中,瞬态分析考虑时间步的离散,Δt为时间步长,阻尼矩阵C=αM+βK,α、β和θ为参数,u0、 、F0为前一步的物理量、时间导数和荷载,F1为当前步的荷载,u1为待求的当前步的物理量,具体见文献[1]。
1.3 总体思路
为了程序设计的通用性和简便性,本文提出将积分模块与被积函数模块分开考虑的思路:针对各种几何形体(包括一维至三维各种形状的分区、条带和边界面)确定不同的数值积分方案;根据偏微分方程的各项组成(如2阶、1阶、0阶偏微分项和非齐次项)及不同的级数类型,计算各种矩阵向量中的被积函数;两者之间任意组合——在积分点处调用被积函数,就可用较短的程序达成各式各样的功能。
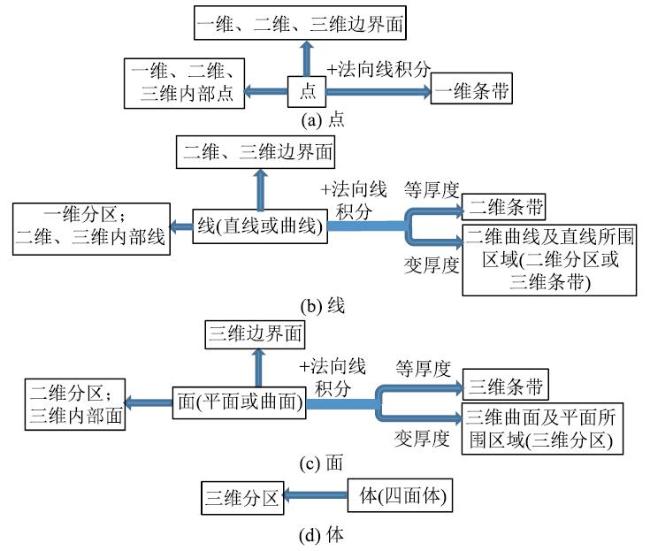
对于积分模块,为适应复杂几何形状,以实现一维至三维的各种分区、条带及边界面的积分,将积分对象以点、线、面、体的几何元素表达,并拆解成单纯形(0维点、1维线、2维三角形、3维四面体)或单纯形与法向线段的组合,采用相对应的数值积分方案,得到积分点处的积分坐标x',然后转换成覆盖坐标 和级数坐标 ,供被积函数模块调用。
对于被积函数模块,根据不同的级数类型,按单位分解函数、坐标转换矩阵和级数矩阵进行分类,计算各种矩阵和向量,主要内容见文献[1]。
2 各种几何形体及其积分方式
1.2节中的单元矩阵和向量积分,分为区域积分和边界积分两类,其中区域积分又分为2个步骤:先不考虑条带,按φi进行“分区积分”;然后再自动添加条带,考虑不同的φi进行“条带积分”。以下就分区、条带和边界3种类型,结合计算模型的输入数据,讨论可能出现的各种积分形体及其积分方式。
2.1 分区积分
。
计算模型的几何输入坐标为 ,通常是整体坐标x,也可能是曲线或曲面的参数坐标 。一般情况下,单纯形(包括在参数坐标 投影面上建立的单纯形)内某个积分点处的积分坐标,即
式中: 为单纯形第k个顶点(或端点)的输入坐标;ξk为积分点位置的局部坐标(查数值积分表[4]);ndim为维数。
2.1.1 一维分区
2.1.2 二维分区
。
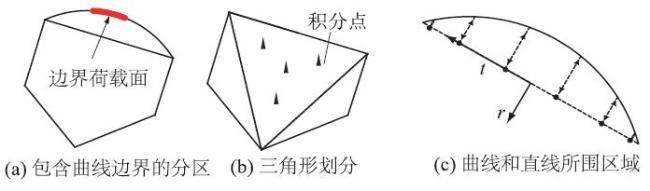
直线段 dS采用一维Gauss积分(图中可见积分点个数ns=6),每个积分点再沿法向进行 dh一维Gauss积分(图中可见积分点个数nh=2),积分上限落在曲线上(采用二分法求得曲线与法向线段的交点[5]),从而实现精确几何边界的模拟。雅克比系数Js和Jh为各自线段长度的一半, 和 为相应的一维各积分点的权值。按 dS和 dh 2个方向的一维线段,分别根据式(2)计算积分坐标x'。
2.1.3 三维分区
考虑如图5(a)所示的包含曲面边界的三维分区。计算模型依次输入描述分区轮廓的平面和曲面,每个面为依次连接的顶点坐标,其中,平面的各顶点采用整体三维坐标x=(x,y,z)输入,曲面的各顶点采用曲面的二维参数坐标 =( , )。

2.2 条带积分

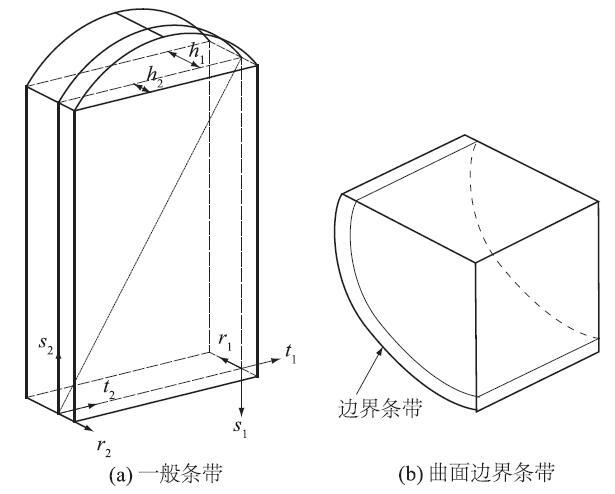
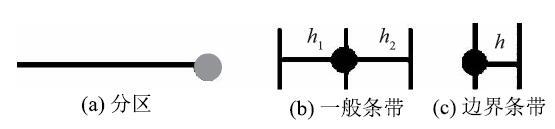
从分区的交界面沿法向朝两侧扩展,以图7(a)的三维条带为例,每一侧沿交界面及其法向建立积分坐标系x'=(x',y',z'),图中表述为t-s-r,其中选取一条线作为t轴,分界面的法向为r轴,并定义原点。两侧厚度分别为h1和h2(称为半条带),由相应的分区面积或体积确定,以保证条带占有整个分区面积或体积的一定比例(如1%)。每部分按式(3)进行积分(即单纯形+法向线段),其中 dS为交界面上的积分, dh沿法向采用等厚度的一维Gauss积分。
在条带的各积分点上,被积函数分为2部分:一部分是条带积分值,考虑单位分解函数φi(具体公式见文献[1])计算局部近似函数,另一部分是需要扣除的重复计算的分区积分值,按φi=1的独立覆盖方式计算。
2.3 边界积分
。
式中:Γ为线或面的积分域,分别映射到线或面的积分坐标x'=(x')或x'=(x',y')上,应用一维Gauss线积分公式,或按图4(b)的方式划分为三角形采用二维Hammer积分公式,曲线和曲面情况的J考虑映射关系。
2.4 小结
综上所述,关于各种积分方式,需要掌握以下几条原则:
(1)几何形体的输入方式为其边界描述,一般为边界顶点坐标 ,包括整体坐标x或参数坐标 2种输入方式,后者表示边界为曲线或曲面,还需输入方程。
(2)分区、边界面拆分为单纯形,按式(1)或式(4)进行数值积分。积分坐标x'按式(2)计算。
(3)条带,分区中的直线与曲线、平面与曲面所围区域,需要建立积分坐标系x',采用单纯形+法向线段(考虑不同的线段长度)的方式,按式(3)分为∫dS dh 2个方向合成积分,积分坐标也分为2个方向按式(2)分别计算。对于曲线或曲面,积分公式中的J还要考虑映射关系。
3 以单纯形几何元素为基础的积分子程序
4 坐标转换及示例
4.1 坐标转换
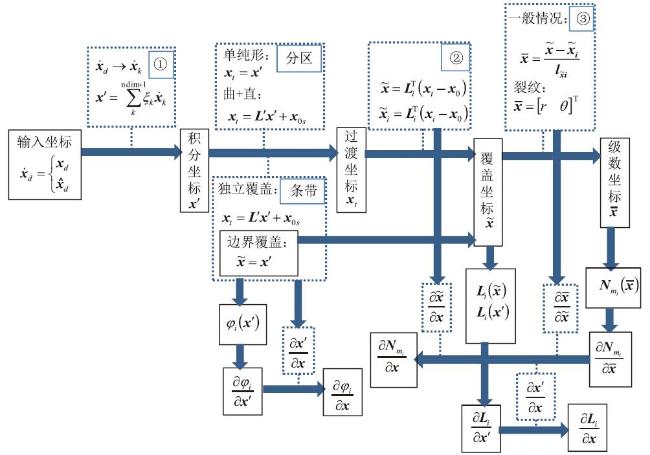
(1)最左侧的输入坐标框中,几何体的输入坐标用 表示,可能是整体坐标xd,或曲线、曲面的参数坐标 。此框向右,在框①中分别取出积分域的第k个顶点坐标 ,按式(2)生成积分坐标x'。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
(5)条带框中,边界条带的边界覆盖,覆盖坐标 =x',在框③中归一化得到级数坐标 。其中,直边界条的xi为整体坐标输入,需要通过 =L'T(xi-x0s)转化到条带局部坐标。
(6)与条带框相关(向下)的是单位分解函数φi(x')及 ,再结合xt=L'x'+x0s得 (条带框向下),进一步得到 。
(7)与覆盖坐标框 相关(向下)的是覆盖坐标转换矩阵Li( ),对于边界覆盖为Li(x'),只有在曲线或曲面情况下才计算 ,结合条带框向下的 得到 。
(8)与级数坐标框 相关(向下)的是级数矩阵 ( )及 ,结合框③向下得到的 ,继续向左结合由框②得到的 (对于边界覆盖,结合 )求得 。
4.2 计算流程示例
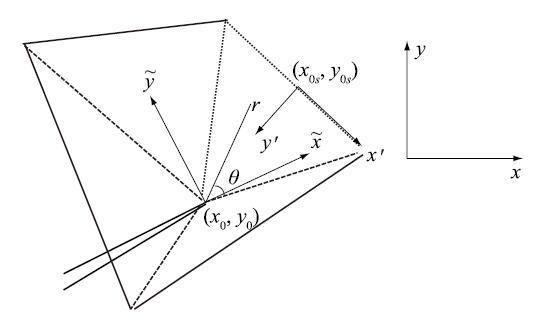
以二维裂纹分析的解析级数为例,具体说明计算流程。
$\tilde{\boldsymbol{u}}_{i}=\left\{\begin{array}{c}\tilde{u} \\\tilde{v}\end{array}\right\}_{i}=\sum_{m_{i}=1}^{n_{i}} \frac{1}{2} r^{\left(m_{i}-1\right) / 2}\left[\begin{array}{ll}f_{1}^{x}(\theta) & f_{2}^{x}(\theta) \\f_{1}^{y}(\theta) & f_{2}^{y}(\theta)\end{array}\right]_{m_{i}}\left\{\begin{array}{l}a \\b\end{array}\right\}_{m_{i}} 。$
图10中与其他覆盖相接的右侧边界,向内扩展成半条带,建立条带坐标系x'=(x',y'),x0s=(x0s,y0s)为坐标系的原点(可选为界面线段的中点)。条带内采用 dS和 dh双向一维Gauss积分,分别按式(2)得到积分点坐标x',其中,先确定 dS的积分点位置x',再由此位置沿法向确定 dh积分点位置y'。然后转换到整体坐标xt=L'x'+x0s。进一步转换到覆盖坐标 = (xt-x0)之后同上操作。条带另一侧连接的其他覆盖,也是通过整体坐标xt转换到其覆盖坐标 。
以上步骤同时演示了在程序中加入新的级数类型的一般过程,需要确定以下内容:①以级数公式确定级数的自由度数、级数坐标 和级数矩阵 ( )(为对角或非对角矩阵);②覆盖坐标 和坐标转换矩阵Li( )(为常量或变量矩阵);③ 、 及x之间的相互关系。
5 矩阵组装及数据模块
5.1 矩阵组装
首先讨论自由度编号。按照独立覆盖(包括边界覆盖)的编号,依次对自由度进行排序,形成整体自由度编号。其中,独立覆盖单元的自由度个数为npde· ni,npde为本文所讨论的几种偏微分方程组的方程个数。对于常用的多项式级数,其阶次pi与项数ni之间的关系是ni=[ (pi+j)]/(ndim!)。条带单元的自由度为两侧覆盖的自由度之和。
在自由度编号过程中,本质边界条件通过边界条带的边界覆盖施加:在边界覆盖中去掉不含有法向坐标r的所有自由度,使之自动满足边界条件。
单元矩阵的计算:对于每个覆盖的每一项级数,首先计算子矩阵 和 ,其维数分别为npde×npde和npde×nb,nb为2阶微分项相关参数矩阵(如弹性矩阵D)的维数;以 = Ω D dΩ为例,是不同级数项的子矩阵 之间的相互乘积,对于条带,还包括不同覆盖的每个级数项之间的乘积,然后根据mi级数项和mj级数项在单元自由度中的排序,放入单元矩阵的合适位置。
各单元矩阵的系数,根据在整体自由度排序的位置,放入整体方程组中。
5.2 公用数据模块与用户子程序
用户输入的计算模型数据,包括:①总体控制信息——独立覆盖(含边界覆盖)的个数,流形单元(含独立覆盖单元和条带单元)的个数、维数、偏微分方程个数等;②每个独立覆盖的形心坐标、半条带的厚度、级数阶次、材料参数号、边界覆盖的约束信息等;③每个流形单元相关的独立覆盖号,描述单元几何信息的边界顶点坐标及其坐标系号(整体坐标系号为0,特殊的覆盖坐标系、曲线或曲面坐标系需要用户依次输入)等;④定义了第二、第三类边界条件的边界几何信息及边界参数号;(5)材料参数和初边值条件参数。这些数据放入公用数据模块,贯穿于整个程序流程,供各个子程序(子过程)调用,一般不可修改。
为了程序的通用性和可扩展性,设立了用户子程序接口,用于输入以下内容:
(1)曲线、曲面方程。常用的几种类型,如圆弧或球面、柱面,多项式描述的曲线或曲面等,可以在输入文件中按指定类型输入其参数,如圆弧半径和圆心,多项式阶次及每项系数。也可以通过用户子程序,直接定义曲线或曲面方程。
(2)参数公式。程序的所有计算参数,如材料参数、初边值条件参数等,可以在输入文件中直接输入数值,或者表述为“fn”,通过用户子程序的第n个公式输入。用户子程序可调用公用数据模块,引入坐标、时间等信息输入这些公式。
6 结论
对一维至三维各种几何形体(包括分区、条带和边界面)的积分方式进行总结,提出基于点、线、面、体的单纯形几何元素实现上述各种积分的积分程序设计方案,并能通过用户子程序输入各种几何外形,实现了模拟任意几何边界的形状通用性。提出将积分模块与被积函数模块分开考虑的编程思路,积分模块考虑各种积分形体对象,而被积函数由偏微分方程的各项组成及级数类型确定,两者可任意组合,使程序具备了扩展性,有望实现偏微分方程求解的通用性。通过级数公式和相应的各种坐标以及坐标转换矩阵、级数矩阵的确定,实现了级数的通用性。可通过用户子程序进行所有计算参数的公式化输入,实现输入参数的通用性。
最终可用较少的程序代码(目前的主体程序不到3 000行Fortran代码),实现了弹性力学运动微分方程、传导方程、波动方程的一维至三维(维数的通用性)稳态和瞬态分析(含一类至三类边界条件),包含了高阶级数逼近、任意形状和任意连接的网格、精确几何边界的模拟及本质边界条件的准确施加、裂纹尖端附近解析级数的应用等独立覆盖流形法的特色功能。梁板壳的程序设计将另文介绍。
文献[8]将给出一维至三维的稳态和瞬态分析算例进行验证,涵盖了位移场、温度场、渗流场、声场、以势函数表示的静电场和不可压缩无旋流场。